Test presnosti GPS
Odchýlka v určení presnej polohy
GPS – globálny polohovací systém dokáže určiť presnú polohu ľubovoľného miesta na Zemi. Umožňuje navigáciu na konkrétne zemepisné súradnice, alebo uloženie aktuálnej polohy do pamäte. Pri opakovanom zisťovaní polohy jedného a toho istého miesta prístroj vždy ukáže odlišné súradnice. Aktuálne zistená pozícia sa líši od skutočnej o určitú odchýlku. Je do zapríčinené samotnou technológiou GPS a ďalšími okolitými vplyvmi.
Už dlhšie mi vŕtala v hlave otázka, aká je v praxi skutočná hodnota tejto odchýlky, a s akou presnosťou respektíve nepresnosťou je možné zaznamenať alebo navigovať na nejakú polohu. Pre zistenie konkrétnych hodnôt som urobil malý experiment, ktorý som potom vyhodnotil.
Obr.1: Meracia aparatúra
Zapol som GPS modul Nokia LD-3W (ďalej už len gpsko) a spustil nahrávanie prejdenej trasy. Gpsko bolo nehybne umiestnené na povale rodinného domu. Výhľadu na oblohu bránila iba škridlová strecha. Gpsko však stále zachytávalo signál z viac ako 6 satelitov. Pre určenie zemepisnej šírky a dĺžky sú potrebné minimálne 3 satelity a pre zistenie polohy s nadmorskou výškou 4.
Obeh satelitu okolo zeme trvá približne 12 hodín. Poloha z gpska sa posielala a ukladala (prostredníctvom bluetooth) do mobilného telefónu v 2 sekundových intervaloch po dobu vyše 12 hodín. Tým som získal 20 000 nameraných údajov. Pred samotným meraním je potrebné vypnúť statickú navigáciu, inak sa bude poloha zaznamenávať až pri pohybe gpska.
Jeden nameraný údaj o polohe obsahuje:
- zemepisnú šírku
- zemepisnú dĺžku
- nadmorskú výšku
- dátum/čas záznamu
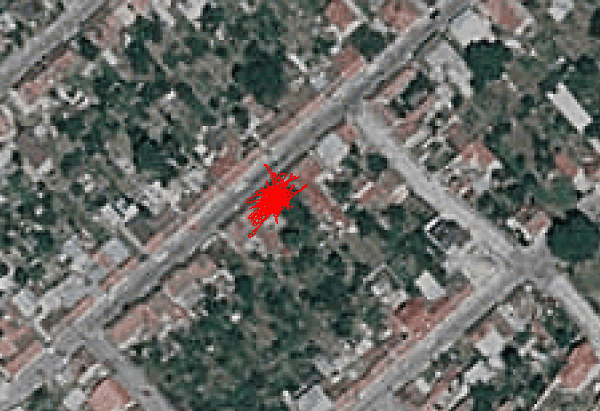
Obr.2: Všetky body zaznamenané za 12 hodín
Na Orb.2 je záznam trasy zobrazený na kalibrovanej mape. Machuľa vyzerá ako prechádzka s gpskom po záhrade, avšak gpsko bolo stále nehybne položené na jednom mieste. Je to súbor nameraných súradníc s určitou odchýlkou od skutočnej presnej polohy. Keďže skutočnú presnú polohu som nepoznal, musel som si ju nejako stanoviť.
Stanovil som si preto bod s názvom „stred“ ktorého zemepisné súradnice sú určené ako aritmetický priemer všetkých nameraných hodnôt počas 12 hodín. Súradnice tohto bodu budem považovať za presnú polohu.
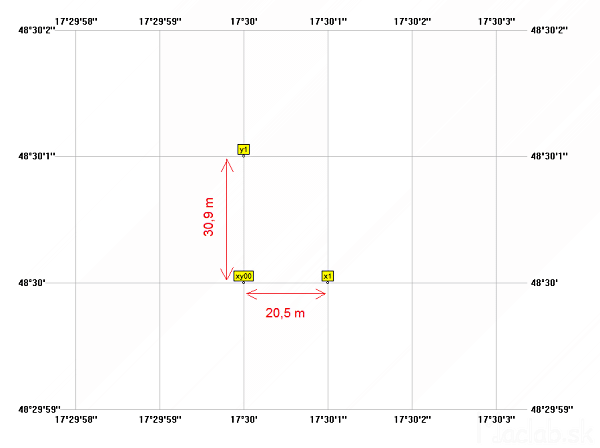
Obr.3: Schéma kovertovania zepepisných súradníc na dĺžkové jednotky.
Keďže ma zaujíma hlavne o koľko metrov mi gpsko ukazuje inak, previedol som zemepisné súradnice na dĺžkové jednotky. Veľmi malú plochu na povrchu Zeme môžeme považovať za rovinu. Elipsodid WGS84 som preto prekonvertoval na pravouhlú súradnicovú sústavu. Počiatok súradnicovej sústavy je totožný s polohou bodu „stred“ a má súradnice [0;0;0].
Namerané hodnoty sa prekonvertovali nasledovne:
- Zemepisná šírka –> os y
- Zemepisná dĺžka – > os x
- Nadmorská výška – > os z
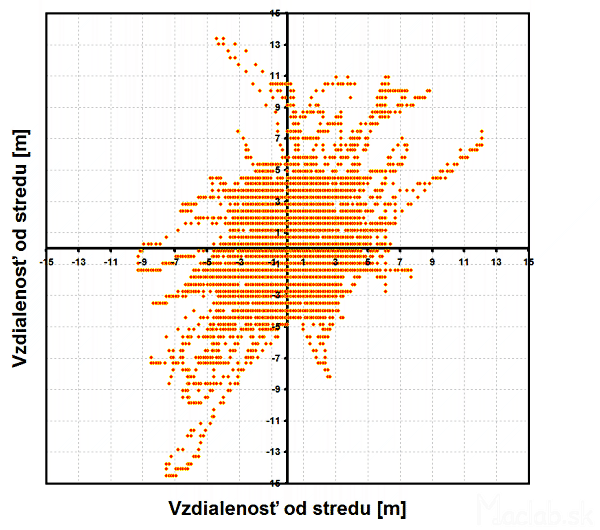
Obr.4: Namerané body v novom súradnicovom systéme.
Na Obr.4 sú namerané body zobrazené v novej súradnicovej sústave náhodne rozmiestnené okolo stredu. Výpočet zemepisných súradníc závisí hlavne od vzájomného usporiadania satelitov na obežnej dráhe. Satelity sa vzhľadom k Zemi pohybujú a tým sa mení aj vypočítaná poloha gpska v čase.
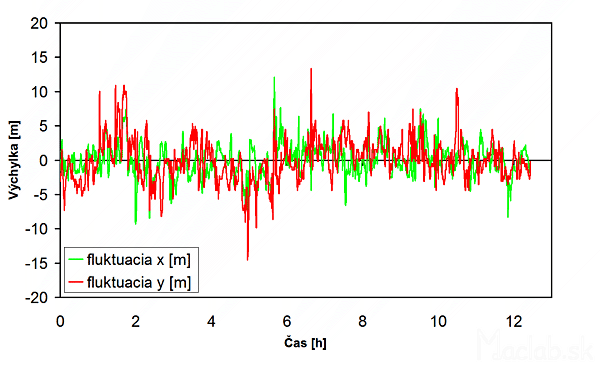
Obr.5: Zmena výchylky od stredu jednotlivo pre smer x a y.
Zobrazil som preto na Obr.5 odchýlku nameranej polohy od stredu v závislosti od času, jednotlivo pre smer v osi x a v osi y. Z obrázku je zrejmé že veľkosť výchylky sa mení takmer rovnako pre smer x aj y. V danom čase je teda rovnakou odchýlkou zaťažený totožne smer x aj y.
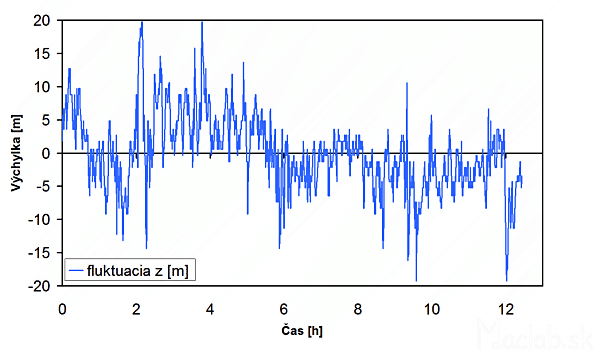
Obr.6: Zmena nadmorskej výšky v čase.
GPS systém umožňuje aj zistenie nadmorskej výšky. Tá je odvodená z priestorových súradníc. Nameraná výška sa taktiež rôzne mení v čase. V našom prípade je to výchylka od stredu v smere osi z. Pri porovnaní grafov je vidno, že hodnoty výchylky v smere osi z sú dvojnásobné oproti smeru v osi x alebo y. Je to spôsobené pravdepodobne tým, že satelity sa „dívajú na gpsko akoby zhora“.
Obr.7: Zobrazenie nameraných polôh v priestore.
Odchýlka od určenia presnej polohy v priestore je potom v skutočnosti 3D objem v tvare mraku. Na Obr.7 sú zobrazené namerané body v 3D priestore. Na osi z je výška v metroch, pričom vzdialenosť od stredu po hornú podstavu kvádru je 20m a vzdialenosť od stredu po stnenu kvádru je 15m. V grafe je toľko hodnôt, že sa navzájom prekrývajú.
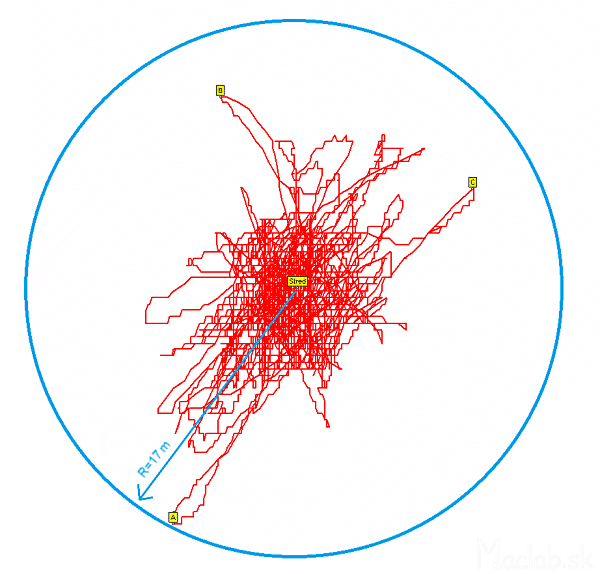
Obr.8: Absolútna vzdialenosť bodu od stredu.
Na presnom určení nadmorskej výšky mi až tak nezáleží. Najviac mi záleží na presnom určení polohy v rovine xy. Zaviedol som pojem Absolútna vzdialenosť od stredu. Je daná veľkosťou vektora, ktorého počiatok je totožný s počiatkom pravouhlej súradnicovej sústavy a koncový bod vektora je daný nameraným bodom.
Príklad pre Obr.8 najvzdialenejším bodom od stredu bol bod A. Absolútna hodnota vzdialenosti bodu A od stredu je 17 metrov.

Obr.9: Zmena absolútnej vzdialenosti v závislosti od času.
Zmeny hodnôt absolútnych vzdialeností v čase som zobrazil v Obr.9. Na obrázku je vidno že fluktuácia absolútnej vzdialenosti sa často vyskytuje blízko stredu ale menej často ďalej od stredu. Priamo v strede sa nevyskytla ani v jednom prípade. Rovnako sa nevyskytla ani mimo oblasti vzdialenejšej ako 17m.
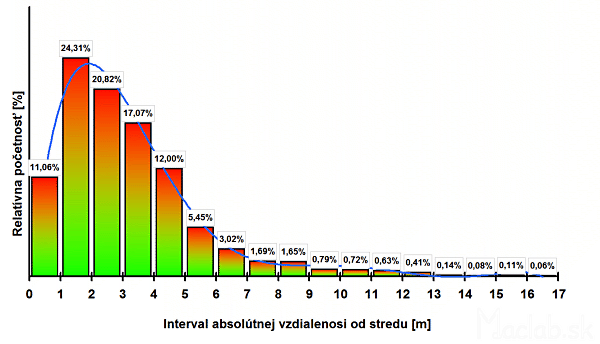
Obr.10: Početnosť bodov zo súboru nameraných hodnôt pre konkrétne intervaly.
Vnútro 17m kružnice som si rozdelil na intervaly s rozostupom 1m. Obr.10 znázorňuje početnosť hodnôt absolútnej vzdialenosti od stredu. Pojem relatívna početnosť znamená že množstvo nameraných hodnôt, ktoré spadajú do daného intervalu je vyjadrených v percentách. Graficky je interval vyjadrený plochou medzikružia so stredom v počiatku.
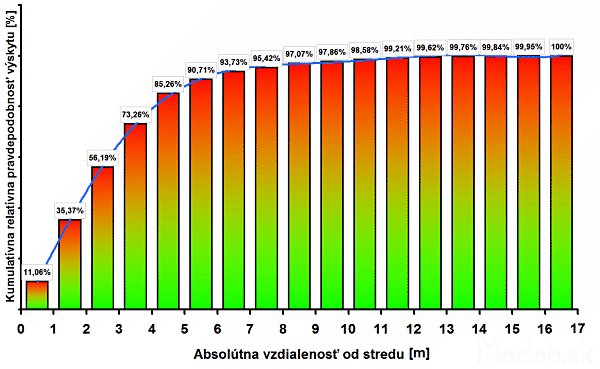
Obr.11: Pravdepodobnosť výskytu pre daný interval absolútnej vzdialenosti od stredu.
Graf kumulatívnej relatívnej pravdepodobnosti vychádza z predchádzajúcich údajov relatívnej početnosti. Udáva s akou pravdepodobnosťou spadá nameraný údaj do daného intervalu. Graficky je interval vyjadrený plochou kruhu so stredom v počiatku.
Pod pojmom presnosť si každý predstavuje niečo iné. Pri hľadaní osamotenej veže na voľnom priestranstve nevadí určenie polohy s odchýlkou aj 200m. Niekomu zasa vadí že stojí na jednej strane križovatky a gpsko mu ukáže polohu na opačnej strane križovatky.
A tu sa konečne dostávame k vyjadreniu presnosti a odchýlky od presnej polohy. Z Obr.11 vyplýva, že pri zachovaní daných podmienok nebude odchýlka od presnej polohy viac ako 17m. Ak by som potreboval určiť polohu s presnosťou na 3m, mám 56% pravdepodobnosť, že odchýlka bude menšia ako 3m. Ak sa ale uspokojím s presnosťou na 12m, mám 99% pravdepodobnosť že určím polohu v tolerancii. Naopak, ak by som chcel presnosť na 1mm čo je v prepočte 0,001m tak trendová čiara (modrá krivka) rýchlo klesá k 0%.
Mnou vypočítané hodnoty presnosti platia iba v prípade, že budú dodržané rovnaké podmienky pre zistenie polohy pomocou GPS. Pri horších podmienkach môže byť odchýlka od presnej polohy aj viac ako 100m.
Podmienky vplývajúce na výpočet polohy:
- Prekážky: budovy, kopce, listy stromov, plechová strecha, tienenie vlastným telom, gpsko položené snímačom nadol
- Atmosférické podmienky: dážď, husté mraky, sneh, prach v ovzduší, rušenie prírodného pôvodu
- GPS prístroj: typ GPS čipu, externá anténa
- Satelity: počet zachytených satelitov, vzájomná poloha, zmena trajektórie, výpadok, porucha, neskorá aktualizácia
Pre dôkladné stanovenie odchýlky by bolo potrebné robiť opakované merania počas viacerých dní a zmeniť aj podmienky. Excel však dokáže pracovať naraz len s 32000 údajmi. V budúcnosti ešte plánujem urobiť jedno meranie v najhorších podmienkach. Napríklad výhľad len na malý pruh oblohy počas hustého sneženia.
Súvisiace články: